




Description
CUAV V5+ Flight Controller | Drone Autopilot PX4 APM – NDB&C BY LOFTY AGROTECH
The CUAV V5+ Flight Controller is a cutting-edge drone autopilot designed for professional UAVs, academic research, and commercial integration. Based on the Pixhawk FMUv5 open hardware standard, this advanced flight controller offers exceptional modularity, high-performance processing, multi-sensor redundancy, and a patented damping system for vibration isolation. With compatibility for PX4 and ArduPilot firmware, the CUAV V5+ Flight Controller is ideal for integrators, UAV developers, and researchers who require precision, reliability, and flexibility.
The V5+ Flight Controller is not just a flight computer; it is a versatile platform for building autonomous vehicles, supporting multirotors, fixed-wing drones, VTOLs, and ground rovers. Its detachable core design allows easy integration with custom carrier boards, providing both flexibility and scalability for UAV system designers.



Overview of CUAV V5+ Flight Controller
The CUAV V5+ Flight Controller combines hardware reliability with software adaptability to meet the demands of modern UAV applications. With an STM32F765 processor running at 216 MHz, 2 MB of FLASH, and 512 KB of RAM, this flight controller ensures rapid computations for real-time flight control.
The built-in patented damping system isolates sensors from vibrations caused by motors and propellers, ensuring accurate data acquisition and smooth flight performance. Multi-sensor redundancy with ICM-20689, ICM-20602 accelerometers and gyroscopes, MS5611 barometer, and IST8310 compass ensures safe and reliable operations even in critical environments.
Designed for NDB&C by Lofty Agrotech, this CUAV V5+ Flight Controller supports advanced UAV operations such as autonomous waypoint navigation, RTK centimeter-level positioning, and real-time telemetry data streaming. It is suitable for applications ranging from academic research to industrial drone projects.
Key Features of CUAV V5+ Flight Controller
Modular and Detachable Core Design
The CUAV V5+ Flight Controller uses a detachable core module for easy integration. Users can install the core on standard drone frames or develop custom carrier boards for specialized UAVs. Benefits include:
- Simplified hardware replacement and upgrades
- Compatibility with Pixhawk standard pinouts
- Flexible deployment for research and industrial UAVs
High-Performance STM32F765 Processor
Equipped with an STM32F765 processor, the CUAV V5+ Flight Controller performs high-speed calculations necessary for real-time autopilot functions. Key advantages:
- 216 MHz processing speed ensures rapid computation of control algorithms
- 2 MB FLASH and 512 KB RAM support complex mission planning and data logging
- Improved flight stability and maneuverability for demanding UAV missions
Multi-Sensor Redundancy
The CUAV V5+ Flight Controller integrates multiple accelerometers, gyroscopes, barometers, and a compass for real-time data monitoring and fault detection. Benefits include:
- Redundant sensor operation for safety-critical applications
- Continuous monitoring of sensor data to prevent in-flight failures
- Enhanced reliability during challenging environmental conditions
Built-in Patented Damping System
The damping system separates the flight controller board from its sensors, reducing mechanical vibrations and electromagnetic interference. Advantages:
- Accurate sensor readings for smoother UAV flight
- Protection against motor-induced oscillations
- Essential for high-precision aerial surveying and mapping
RTK Support and GPS Integration
The CUAV V5+ Flight Controller supports RTK modules (sold separately) for centimeter-level GPS accuracy. This feature is vital for:
- Surveying and mapping applications
- Precision agriculture
- Industrial UAV operations requiring high positional accuracy
PX4 and ArduPilot Compatibility
Fully compatible with PX4 and ArduPilot firmware, this flight controller offers:
- Flexible mission planning
- Access to a large open-source developer community
- Ease of integration with telemetry, cameras, and payload sensors
Multi-Platform Versatility
The CUAV V5+ Flight Controller supports:
- Quadcopters, hexacopters, and octocopters
- Fixed-wing UAVs and VTOLs
- Ground rovers for autonomous navigation
This versatility makes it suitable for commercial, industrial, and research applications.
Technical Specifications
| Specification | Details |
|---|---|
| Processor | STM32F765 (32-bit ARM Cortex-M7, 216 MHz, 2 MB FLASH, 512 KB RAM) |
| I/O Processor | STM32F100 (32-bit ARM Cortex-M3, 24 MHz, 8 KB SRAM) |
| Sensors | ICM-20689 & ICM-20602 accelerometer/gyro, MS5611 barometer, IST8310 compass |
| Power Rating | 4.3–5.4 V |
| USB Input | 4.75–5.25 V |
| Servo Rail Input | 0–36 V |
| Dimensions | 85.5 × 42 × 33 mm |
| Weight | 90 g |
| Shipping Weight | 0.333 kg |
| Shipping Dimensions | 15 × 15 × 5 cm |
| Firmware | PX4, ArduPilot |
These specifications ensure that the CUAV V5+ Flight Controller is robust, versatile, and capable of handling industrial-grade UAV operations.
Applications of CUAV V5+ Flight Controller
Academic Research
The CUAV V5+ Flight Controller is widely used in universities and research labs for:
- UAV algorithm testing
- Autonomous flight experiments
- Robotics research
Commercial UAV Systems
Industries leverage the CUAV V5+ Flight Controller for:
- Precision agriculture drones
- Industrial inspections (power lines, pipelines)
- Surveying, mapping, and logistics operations
Autonomous Navigation
Supports waypoint missions, automated surveying, and GPS-based route planning. The redundancy and damping system ensures safety during critical missions.
VTOL and Multi-Rotor Platforms
The CUAV V5+ Flight Controller integrates seamlessly with multirotors, fixed-wing VTOLs, and hybrid UAVs. Its modular design allows:
- Easy installation on different airframes
- RTK integration for high-accuracy positioning
- Custom payload and sensor integration
Installation and Setup

Proper installation and setup of the CUAV V5+ Flight Controller is critical to ensure reliable performance, accurate flight control, and mission success. The process involves careful mounting, precise wiring, software configuration, and thorough pre-flight checks.
Mounting the Controller
- Flat and Vibration-Free Surface: Ensure that the drone frame provides a flat surface for the flight controller. Uneven surfaces can lead to sensor misalignment and inaccurate flight stabilization.
- Secure Placement: Use the included mounting screws to fasten the controller firmly. Avoid over-tightening to prevent damage to the PCB.
- Sensor Isolation: Utilize the provided damping pads or built-in shock-absorbing system to isolate the IMU and other onboard sensors from vibrations generated by motors and propellers. This helps maintain accurate sensor readings and smooth flight performance.
- Orientation: Make sure the controller is mounted in the correct orientation as specified in the manual. Incorrect orientation can result in calibration errors and unstable flight.
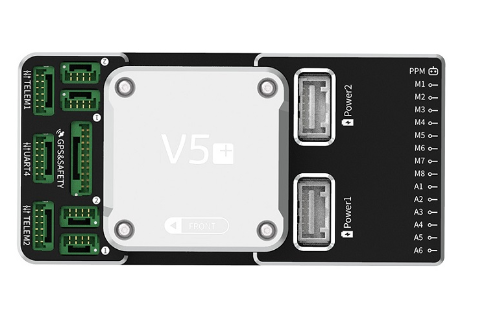
Wiring and Connections
- PWM and Servo Outputs: Connect all motor Electronic Speed Controllers (ESCs) to the designated PWM ports. For drones with servos, ensure correct servo connections.
- Telemetry Modules: Connect telemetry radios to the appropriate UART ports to enable real-time data transmission and monitoring.
- GPS and Compass: Attach GPS modules and external compasses (if used). Ensure proper orientation and secure mounting to reduce magnetic interference.
- Power Inputs: Connect dual redundant power inputs carefully, ensuring correct polarity and secure connections. Dual power inputs provide backup in case one power source fails, which is crucial for industrial and long-duration missions.
- Cable Management: Route cables neatly to avoid entanglement with moving parts or interference with the damping system. Use cable ties and heat shrink where needed for added safety.
Software Configuration
- Install Compatible Software: Set up PX4, ArduPilot, or other supported software platforms on your computer. This enables you to configure the flight controller and manage missions.
- UAV Type Selection: Configure the software according to your vehicle type, such as multirotor, fixed-wing, or rover. Each vehicle type has specific control parameters.
- Sensor Calibration: Calibrate the accelerometer, gyroscope, barometer, and compass through the software interface. Proper calibration ensures accurate orientation, altitude, and navigation.
- Mission Parameters: Load any pre-planned waypoints, flight paths, or mission parameters. Adjust flight limits, safety boundaries, and return-to-home settings as needed.
Pre-Flight Checks
- Firmware Update: Verify that the CUAV V5+ Flight Controller is running the latest firmware to ensure compatibility, stability, and access to new features.
- Motor and Servo Testing: Perform a bench test of motor outputs and servos to confirm correct connections and responses.
- Sensor Verification: Recheck sensor calibration to ensure accurate flight data.
- Controlled Test Flight: Conduct an initial flight in a safe, open area to observe stability, responsiveness, and control accuracy. Make adjustments if necessary before full operational deployment.
Advantages of CUAV V5+ Flight Controller
The CUAV V5+ Flight Controller offers unmatched performance and reliability for both academic research and professional UAV operations. Its advanced hardware design, multi-sensor integration, and modularity provide UAV operators with precision, safety, and flexibility.
Enhanced Safety
Safety is paramount for commercial and industrial UAV operations, and the CUAV V5+ Flight Controller delivers it through:
- Multi-Sensor Redundancy: The flight controller integrates multiple accelerometers, gyroscopes, barometers, and magnetometers. If one sensor fails or produces unreliable data, the system automatically switches to backup sensors, maintaining stable flight.
- Dual Processor Architecture: With an STM32F765 main processor and STM32F100 I/O processor, critical computations continue without interruption in the event of hardware failure.
- Built-in Damping System: Isolates the IMU from vibrations, protecting sensors from mechanical shocks during high-speed maneuvers or turbulent flight.
This multi-layer safety ensures UAVs remain stable and mission-critical operations can continue even under adverse conditions.
Precision and Accuracy
The CUAV V5+ Flight Controller is designed for missions requiring exact control and positioning:
- High-Performance STM32F765 Processor: Clocked at 216 MHz with 2MB Flash and 512KB RAM, the processor enables rapid calculations for real-time flight adjustments.
- Patented Damping System: Reduces sensor noise and vibration interference, improving flight stabilization and data accuracy.
- RTK GPS Support: When paired with an RTK module, centimeter-level positioning is possible, crucial for surveying, mapping, and industrial inspection.
These features allow UAV operators to achieve precise waypoint navigation, stable flight paths, and accurate sensor data collection for advanced applications.
Flexibility
The CUAV V5+ Flight Controller’s modular design offers unmatched adaptability:
- Detachable Core Design: The core module can be used directly or integrated with customized carrier boards to fit specific UAV projects.
- PX4 and ArduPilot Compatibility: Supports open-source firmware for easy customization, including advanced flight modes, autonomous missions, and integration with additional sensors.
- Modular Interfaces: Standard Pixhawk pinouts allow connection to various peripherals, telemetry modules, and additional payloads.
This flexibility enables the flight controller to be used across research, commercial UAVs, and industrial automation projects, allowing engineers and hobbyists to tailor the system for specific needs.
Reliability
The CUAV V5+ is engineered to operate reliably in demanding conditions:
- High-Performance Components: Multi-sensor redundancy and a powerful processor ensure consistent flight even under heavy loads.
- Environmental Resilience: Built to withstand vibration, strong winds, and rapid maneuvers, maintaining stability during industrial inspections or outdoor operations.
- Consistent Data Accuracy: Even during aggressive maneuvers, the flight controller provides stable, precise outputs, reducing the risk of mission failure.
Reliability is crucial for UAV operations in critical tasks such as emergency response, power line inspection, and precision agriculture, where operational failure can be costly or dangerous.
Maintenance and Care
Proper maintenance and regular care of your CUAV V5+ Flight Controller are crucial for long-term reliability, accurate flight control, and safe UAV operation. By following these steps, operators can prevent common issues, optimize performance, and extend the lifespan of the flight controller.
Firmware Updates
Firmware updates are essential to keep your CUAV V5+ Flight Controller running smoothly. Updating the PX4 or ArduPilot firmware ensures:
- Access to New Features: New flight modes, mission planning capabilities, and support for additional sensors.
- Improved Algorithms: Enhancements in stabilization, sensor fusion, and autonomous navigation for better flight accuracy.
- Enhanced Safety: Bug fixes and reliability improvements reduce the risk of system crashes or unexpected behavior during flight.
Best Practices:
- Connect your flight controller to a PC using USB.
- Open PX4 or Mission Planner software.
- Check for the latest firmware version compatible with your UAV setup.
- Backup existing configurations before updating.
- Follow on-screen instructions to install updates.
Regular firmware maintenance ensures that the CUAV V5+ Flight Controller remains optimized for industrial, commercial, and research UAV missions.
Sensor Calibration
Accurate sensor readings are the foundation of stable flight. The CUAV V5+ contains multiple sensors, including accelerometers, gyroscopes, barometers, and magnetometers. Improper calibration can lead to unstable flight, drift, or erroneous GPS readings.
Steps for Effective Sensor Calibration:
- Accelerometer & Gyroscope: Calibrate on a flat, vibration-free surface. Perform calibration after firmware updates or mechanical adjustments.
- Compass Calibration: Follow PX4 or ArduPilot instructions to perform a full 360° rotation for the compass. Ensure no metallic objects or electronic interference are nearby.
- Barometer Calibration: Keep the UAV at a known altitude for accurate atmospheric pressure readings.
Proper calibration ensures precise attitude control, stable navigation, and accurate waypoint execution for autonomous missions.
Component Inspection
Regular physical inspections help prevent mechanical failures and sensor interference. For the CUAV V5+ Flight Controller:
- Mounting Screws: Verify that all screws are tight but not over-torqued. Loose mounting can introduce vibrations affecting the IMU.
- Connectors and Wiring: Check for loose, frayed, or damaged wires. Ensure connectors are fully seated.
- Damping Pads & Isolation: Inspect the patented damping system that separates the IMU from the mainboard. Replace worn pads to maintain vibration isolation.
A routine inspection schedule reduces in-flight failures and ensures the flight controller remains in optimal working condition.
Data Analysis
Onboard data logging is one of the most powerful features of the CUAV V5+ Flight Controller. By analyzing logs, operators can:
- Troubleshoot Errors: Identify sensor anomalies, motor irregularities, or GPS signal issues.
- Optimize Flight Performance: Review flight paths, stability, and control responses to improve UAV efficiency.
- Plan Future Missions: Learn from past flights to fine-tune parameters for autonomous missions, waypoint navigation, or payload management.
Recommended Tools: PX4 log analyzer, Mission Planner, or QGroundControl for detailed review of flight data.
Regular analysis of flight logs ensures your CUAV V5+ Flight Controller performs reliably under all conditions, whether in research, industrial applications, or commercial UAV operations.
Troubleshooting
While the CUAV V5+ Flight Controller is engineered for reliability and stability, occasional issues may arise during setup or operation. Proper troubleshooting ensures your UAV maintains peak performance and prevents potential damage during flights. Below are detailed solutions for common problems.
Flight Controller Not Detected
If your flight controller is not recognized by your PC or software, follow these steps:
- Check USB Connection: Ensure that the USB cable is properly connected to both the flight controller and the computer. Use a high-quality cable to avoid connectivity issues.
- Install Necessary Drivers: Verify that drivers for the STM32F765 processor and PX4/ArduPilot firmware are installed. On Windows, you may need the STM32 Virtual COM Port driver.
- Reconnect via Software: Open PX4, Mission Planner, or ArduPilot software and reconnect the flight controller. Restart the software if necessary.
- Test on Another Computer: If the controller still isn’t detected, try connecting it to a different PC to rule out computer-specific issues.
Proper connection ensures your CUAV V5+ Flight Controller can communicate with the software, allowing firmware updates, parameter adjustments, and real-time telemetry.
Unstable Flight
Unstable flight can result from sensor errors, improper mounting, or calibration issues. Steps to resolve:
- Sensor Calibration: Recalibrate the accelerometer, gyroscope, and compass using PX4 or ArduPilot software. Accurate sensor calibration is critical for stable flight and precise control.
- Inspect Damping System: The patented damping system isolates the IMU from vibrations. Ensure that it is properly installed and not damaged. Loose or improperly mounted damping pads can cause oscillations or erratic behavior.
- Check IMU Mounting: Verify that the flight controller is securely mounted on a flat, vibration-free surface. Any tilt or movement can affect sensor readings.
- Check Propeller Balance and Motor Performance: Imbalanced propellers or faulty motors can introduce vibrations that the controller may interpret as instability.
Addressing these factors ensures your UAV maintains smooth flight performance and reliable maneuverability.
GPS Errors
GPS errors can prevent autonomous missions or waypoint execution. Common causes and solutions include:
- Verify GPS Module Connection: Ensure the GPS module is correctly connected to the CUAV V5+ Flight Controller. Loose wires or poor soldering can cause signal loss.
- Check Firmware Support: Confirm that your firmware supports autonomous navigation and GPS waypoint missions. PX4 and ArduPilot configurations must match your UAV type.
- Test GPS Reception: Position the UAV outdoors with a clear view of the sky. Obstructions like buildings or metal structures can interfere with satellite signals.
- Enable RTK Module if Needed: For centimeter-level accuracy, ensure the RTK module is installed and properly configured.
Proper GPS functionality is essential for autonomous flight, mapping, and surveying applications, ensuring the UAV follows precise paths without deviation.
Power Failures
The CUAV V5+ Flight Controller relies on dual redundant power inputs to maintain uninterrupted operation. Power-related troubleshooting steps:
- Check Redundant Inputs: Ensure both power inputs are connected to the correct voltage source. Dual redundant inputs protect the controller from single battery failures.
- Verify Voltage Levels: Confirm that the voltage supplied is within the recommended range (4.3–5.4V). Overvoltage or undervoltage can trigger controller shutdown or erratic behavior.
- Inspect Wiring and Connectors: Look for loose wires, damaged cables, or corrosion on connectors. Proper power delivery is critical for stable operation.
- Test Power Modules: If power failures persist, test the individual power modules or battery sources to isolate the issue.
Maintaining stable power ensures that all sensors, processors, and connected peripherals operate reliably during flight missions.
Conclusion
The CUAV V5+ Flight Controller by NDB&C Lofty Agrotech is an advanced, reliable, and flexible autopilot solution for professional UAVs. Its high-performance STM32F765 processor, multi-sensor redundancy, patented damping system, and RTK compatibility make it ideal for academic, industrial, and commercial applications. Whether for research, surveying, mapping, or industrial inspection, this flight controller ensures safe, precise, and stable operations.
By choosing the CUAV V5+ Flight Controller, drone developers and integrators gain a versatile platform capable of handling complex UAV missions with confidence and precision.
Link
 In stock now. Limited quantities available. Ships within 24 hours.
In stock now. Limited quantities available. Ships within 24 hours.
LOOKING FOR MORE? DISCOVER EVERYTHING WITH OFFER AT http://www.loftyagrotech.com
Explore more in our camera drone collection and find the right aerial companion.
Before flying, ensure you’re compliant with India’s drone regulations (DGCA DigitalSky Portal).



Reviews
There are no reviews yet.