



Description
Kakute F4 Flight Controller
The Kakute F4 Flight Controller from NDB&C by LOFTY AGROTECH is a high-performance flight controller designed for FPV racing, freestyle drones, and advanced UAV applications. Featuring the STM32F405RGT6 32-bit processor and a sensitive 6-axis IMU (ICM20689) mounted on vibration isolation foam, it offers precise control, high-speed computations, and reliable stability. Supporting Betaflight and Cleanflight firmware, the Kakute F4 Flight Controller enables pilots and developers to customize, optimize, and enhance drone performance to the highest standards.
Overview of the Kakute F4 Flight Controller
The Kakute F4 Flight Controller is built to meet the demands of competitive FPV pilots and developers seeking advanced features with reliable performance. With full OSD (On-Screen Display) support, multi-protocol serial compatibility, and a robust 32-bit processor, this controller is ideal for both hobbyists and professional UAV operators.
High-Performance STM32F405 Processor
At the heart of the Kakute F4 Flight Controller is the STM32F405RGT6 32-bit processor, capable of running high-speed 8 kHz PID loops with minimal CPU usage. This ensures that all drone sensors and motors respond in real-time, offering smooth flight control, fast reaction times, and precise handling for FPV racing or freestyle maneuvers.
Advanced IMU with Vibration Isolation
The onboard ICM20689 6-axis gyroscope and accelerometer provides accurate motion detection and orientation. Mounted on vibration-isolation foam, the IMU minimizes noise from motors and propellers, delivering stable and precise flight readings. This design ensures that the Kakute F4 Flight Controller can handle high-performance drones under extreme conditions.
Key Features of Kakute F4 Flight Controller
The Kakute F4 Flight Controller includes several features that make it a preferred choice among drone enthusiasts and developers.
Full OSD Functionality
The integrated OSD (On-Screen Display) allows pilots to monitor critical flight data directly on FPV goggles or display. Users can adjust PID values, VTX channels, and power levels without connecting to a computer, streamlining in-field configuration.
Multi-Protocol Serial Support
Unlike other F4 controllers, the Kakute F4 Flight Controller supports multiple serial protocols simultaneously, including FrSky SBUS and SmartPort. This enables telemetry and receiver communication without the need for protocol inversion, simplifying wiring and setup.
BLHeli Pass-Through Support
The flight controller supports BLHeli pass-through, allowing direct ESC configuration and firmware updates. This ensures that the Kakute F4 Flight Controller maintains optimal motor performance and compatibility with a wide range of ESCs.
High Voltage Range with Monitoring
With a voltage input range of 7–42V, the Kakute F4 Flight Controller accommodates various battery configurations. Built-in automatic voltage monitoring protects the drone from low or over-voltage situations, ensuring safe operation.
Installation and Setup
Proper installation is crucial to harness the full capabilities of the Kakute F4 Flight Controller.
Mounting Guidelines
Mount the Kakute F4 Flight Controller on a flat surface, ideally using vibration-damping foam. Proper orientation along the drone’s forward axis ensures accurate pitch, roll, and yaw readings.
Sensor Calibration
Calibration of the gyroscope and accelerometer is essential for stable flight. Using Betaflight or Cleanflight, pilots can ensure the Kakute F4 Flight Controller provides accurate sensor data for autonomous and manual control.
Firmware Configuration
Configure flight modes, PID parameters, and peripheral connections using Betaflight/Cleanflight. The Kakute F4 Flight Controller supports advanced customization, enabling tailored performance for racing, freestyle, or research UAV applications.
Performance Advantages
Fast PID Loop and Low Latency
The 8 kHz PID loop allows the Kakute F4 Flight Controller to compute motor outputs faster than many competitors, reducing latency and improving control accuracy. This feature is crucial for high-speed FPV racing and acrobatic drones.
Reliability and Stability
Redundant sensors and vibration isolation reduce flight errors caused by mechanical vibrations. The Kakute F4 Flight Controller maintains stable orientation, even during aggressive maneuvers.
Compatibility and Expandability
With multiple UART, I2C, SPI, and ADC interfaces, the Kakute F4 Flight Controller supports various telemetry modules, GPS units, and peripheral sensors. This modularity enables advanced UAV development and experimentation.
Advanced UAV Applications
FPV Racing and Freestyle
The Kakute F4 Flight Controller delivers precision control required for FPV racing and freestyle drones. High-speed processing ensures fast response times and smooth maneuvering in competitive environments.
Autonomous UAV Research
Researchers can integrate sensors, cameras, and telemetry modules for autonomous navigation experiments. The Kakute F4 Flight Controller supports scripting, data logging, and algorithm testing for academic or commercial UAV projects.
Industrial UAV Deployments
For inspection, mapping, or survey UAVs, the Kakute F4 Flight Controller provides reliable sensor integration and stable flight control. Its versatility enables precise aerial operations in industrial applications.
Safety and Reliability
Voltage and Power Protection
Automatic voltage monitoring protects the Kakute F4 Flight Controller from spikes or drops, ensuring safe operation of connected ESCs and peripherals.
Redundant Sensor Safety
The vibration-isolated IMU prevents sensor errors caused by environmental factors, providing reliable orientation data during high-vibration operations.
Flight Data Logging
The controller supports logging of sensor data, motor outputs, and telemetry for post-flight analysis. This feature aids in troubleshooting and preventive maintenance, improving UAV reliability.
Customer Support and Resources
NDB&C by LOFTY AGROTECH Support
Purchasing the Kakute F4 Flight Controller from NDB&C by LOFTY AGROTECH includes expert guidance on installation, firmware updates, and troubleshooting.
Community Resources
Access forums, tutorials, and shared configuration files to optimize the Kakute F4 Flight Controller for FPV, research, or industrial drones. The community provides solutions for common issues and enhances operational knowledge.
Environmental Adaptability
Operating Temperature Range
The Kakute F4 Flight Controller functions reliably across a wide temperature range, suitable for outdoor racing or harsh conditions.
Vibration Resistance
Integrated vibration-damping ensures sensor accuracy and reduces flight instability, even under extreme maneuvering.
EMI and Interference Protection
The controller is shielded against electromagnetic interference, ensuring stable performance near wireless networks or high-voltage equipment.
Maintenance and Firmware Updates
Proper maintenance and timely firmware updates are essential to keep the Kakute F4 Flight Controller performing at its peak. Regular care ensures reliable UAV operation, prolongs hardware life, and allows pilots to take full advantage of the controller’s advanced features.
Firmware Updates
The Kakute F4 Flight Controller supports Betaflight and Cleanflight firmware, both of which receive regular updates from the developer community. Updating the firmware ensures:
- Improved Stability: Newer versions enhance flight stability, reduce drift, and improve sensor integration.
- Feature Additions: Updated firmware introduces new flight modes, OSD functionalities, and compatibility with additional peripherals.
- Bug Fixes: Updates correct known issues in previous releases, preventing in-flight errors and system crashes.
Operators are encouraged to check firmware updates regularly. The controller’s compatibility with BLHeli pass-through simplifies upgrading ESCs and adjusting motor configurations without additional tools.
Flight Data Logging
The Kakute F4 supports onboard logging of key flight parameters such as:
- Sensor Readings: Gyroscope, accelerometer, and magnetometer data to monitor UAV stability.
- Motor Outputs: PWM or DShot motor performance metrics for analyzing thrust and efficiency.
- Flight Events: Logs of errors, failsafe activations, and telemetry for post-flight review.
These logs enable pilots to detect anomalies, fine-tune PID settings, and optimize performance for racing, freestyle, or industrial applications. By examining past flight data, operators can perform preventive maintenance and avoid potential failures before they affect UAV operations.
Troubleshooting Guides
The Kakute F4 Flight Controller is supported by comprehensive troubleshooting resources, both from NDB&C by LOFTY AGROTECH and the broader community. Key areas include:
- Calibration Issues: Step-by-step guidance for accelerometer, gyro, and compass calibration ensures accurate sensor readings and stable flight.
- Connectivity Problems: Solutions for receiver binding, telemetry setup, and serial port configuration help maintain uninterrupted communication.
- ESC Configuration Challenges: BLHeli pass-through allows easy ESC adjustments and firmware upgrades, while troubleshooting guides address common ESC errors.
With these resources, operators can quickly identify and resolve issues, ensuring the Kakute F4 Flight Controller performs reliably in any mission scenario.
Technical Specifications of Kakute F4 Flight Controller
The Kakute F4 Flight Controller from NDB&C by LOFTY AGROTECH is a high-performance flight controller designed for FPV racing, freestyle drones, and professional UAV projects. Its technical specifications combine precision, reliability, and versatility, ensuring superior control and stable flight performance. Below is an elaborated breakdown of its key specifications:
Processor: STM32F405RGT6 32-bit
The heart of the Kakute F4 Flight Controller is the STM32F405RGT6 32-bit processor. This powerful microcontroller supports high-speed calculations, allowing the flight controller to run all functions at an 8 kHz PID loop rate with minimal CPU utilization. It provides the processing capability needed to manage multi-sensor input, execute complex flight algorithms, and maintain real-time flight stability, even during aggressive maneuvers in FPV racing or freestyle flying.
IMU: ICM20689 6-Axis Gyroscope and Accelerometer
Equipped with the high-performance ICM20689 IMU, the Kakute F4 Flight Controller integrates a 3-axis gyroscope and a 3-axis accelerometer. This combination ensures precise motion sensing and orientation detection. The IMU is mounted on vibration-isolation foam, reducing noise and improving measurement accuracy. This system allows the flight controller to maintain smooth and stable flight, even in high-vibration environments such as racing or heavy-lift UAVs.
Flash Memory: 128 MB
The Kakute F4 comes with 128 MB of onboard flash memory. This memory allows for extensive firmware storage, logging capabilities, and easy management of settings, PID configurations, and OSD parameters. Pilots can customize and store multiple profiles for different UAV builds, ensuring flexibility and adaptability for various flight scenarios.
Voltage Input: 7–42V with Automatic Monitoring
The flight controller supports a wide input voltage range of 7–42V, making it compatible with various battery setups. Automatic voltage monitoring safeguards the system by detecting over-voltage or under-voltage conditions, protecting both the flight controller and connected components such as ESCs and receivers. This feature ensures reliable operation and prevents damage during high-current or fluctuating power conditions.
Mounting Hole Diameter: 30.5 × 30.5 mm
The Kakute F4 Flight Controller is designed for standard 30.5 × 30.5 mm mounting, making it compatible with most drone frames. This standardization simplifies installation and allows pilots to replace or upgrade flight controllers without redesigning the drone chassis.
Dimensions: 36.5 × 36.5 × 8 mm
With compact dimensions, the Kakute F4 Flight Controller is suitable for small and medium-sized UAV builds. Its low-profile design ensures minimal interference with frame components while reducing the overall weight of the UAV, which is critical for flight efficiency and maneuverability in FPV racing and freestyle drones.
Weight: 7.4 g
Lightweight construction at just 7.4 grams ensures minimal added payload, enhancing flight performance. The low weight contributes to higher agility, faster response times, and extended flight duration, particularly important in racing and acrobatic UAV applications.
Firmware: Betaflight / Cleanflight
The Kakute F4 Flight Controller supports Betaflight and Cleanflight firmware, providing access to advanced flight features, PID tuning, and OSD customization. These firmware options allow users to configure and optimize their UAV for various flight modes, including manual, stabilized, and acrobatic flight, ensuring maximum flexibility for FPV enthusiasts and professional operators.
Additional Features
- Full On-Screen Display (OSD): Adjust flight parameters, monitor battery voltage, and telemetry data directly via FPV goggles or monitor screen without connecting to a computer.
- BLHeli Pass-Through Support: Allows seamless ESC configuration and firmware upgrades via the flight controller, reducing setup complexity.
- Multi-Protocol Serial Support: Compatible with multiple receiver protocols including FrSky SBUS and SmartPort simultaneously, ensuring flexibility for various RC systems.
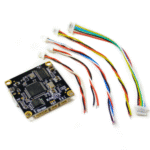
Package Includes
- 1 × Kakute F4 V1.4 Flight Controller
- Vibration isolation foam
- Documentation and configuration guide
Advanced Flight Modes
Acro and Horizon Modes
Explain how the Kakute F4 Flight Controller supports acrobatic flight (Acro) for freestyle pilots and Horizon mode for beginner-friendly stabilization.
Angle Mode and Level Mode
Discuss stabilized flight modes that use sensor fusion for steady flight, ideal for training or cinematic drone applications.
Telemetry and Remote Monitoring
Real-Time Data Transmission
Describe how the flight controller can transmit telemetry data to ground stations, mobile apps, or FPV goggles for instant monitoring.
Battery and Voltage Monitoring
Highlight how onboard voltage and current sensors allow pilots to monitor power consumption in real-time.
Connectivity and Expansion
UART and SPI Interfaces
Explain the advantages of multiple serial ports for adding GPS, telemetry radios, LiDAR, or other sensors.
I2C and ADC Support
Detail how the Kakute F4 Flight Controller can integrate with external devices for environmental sensing, automated payload control, or research instrumentation.
Flight Safety Enhancements
Fail-Safe Mechanisms
Cover how the controller handles signal loss, low battery, or motor failure to safely land or hover the UAV.
Anti-Vibration and Noise Filtering
Elaborate on vibration isolation and sensor filtering, critical for FPV racing and professional UAV missions.
Redundant Sensors for Critical Applications
Discuss dual IMUs and accelerometers, which maintain stability even if one sensor fails.
Data Logging and Analysis
Blackbox Logging Support
Explain how flight data can be recorded for post-flight analysis, tuning PIDs, or academic research.
Advanced Parameter Tuning
Detail how pilots can tweak PIDs, filters, and rates using Betaflight/OSD for optimal performance.
Integration with FPV Systems
OSD Customization
Explain how FPV pilots can overlay critical data such as battery voltage, flight time, and RSSI directly on their goggles.
VTX Control via OSD
Show how the flight controller allows VTX channel and power adjustments without reconnecting to a computer.
Use Cases for Different UAV Types
Racing and Freestyle Drones
Elaborate on agility, response time, and PID tuning benefits for competitive pilots.
Educational and Research Drones
Explain how it can be used in labs and universities for autonomous flight experiments.
Industrial UAVs
Discuss potential applications in surveying, mapping, inspections, and payload delivery.
Firmware Customization
Betaflight vs Cleanflight
Compare the two firmware options, explaining which applications each is best suited for with the Kakute F4 Flight Controller.
BLHeli ESC Configuration
Elaborate on ESC pass-through support for motor optimization and performance tuning.
Troubleshooting and Support
Common Installation Issues
Proper installation is essential to ensure that the Kakute F4 Flight Controller performs optimally. Common issues include miswiring ESCs, connecting serial ports incorrectly, or mounting the flight controller in a non-level or unstable position. To avoid these problems, always refer to the wiring diagrams provided in the user manual and ensure the flight controller is mounted securely on a vibration-damped surface. Checking connectors and ensuring correct polarity prevents potential damage to the board and peripheral components. Following these installation guidelines ensures smooth initial setup and reduces troubleshooting time.
Calibration Errors
Calibration is a critical step for stable flight. Pilots often encounter issues with accelerometer, gyroscope, or compass misalignment. The Kakute F4 Flight Controller allows step-by-step calibration via Betaflight or Cleanflight software. Users should perform sensor calibration on a flat, stable surface, following prompts in the software. Recalibrating the IMU, accelerometer, and compass can correct flight drift, erratic movements, or incorrect OSD readings. Proper calibration ensures accurate PID control and reliable flight performance for FPV racing, freestyle flying, or experimental UAV operations.
Community and Expert Support
The Kakute F4 Flight Controller benefits from a wide range of community and expert resources. NDB&C by LOFTY AGROTECH provides technical support, firmware updates, and troubleshooting guidance. Additionally, users can access forums, tutorials, shared configuration files, and video guides to optimize performance and resolve issues efficiently. Leveraging these resources ensures that pilots and developers can maximize the controller’s capabilities while minimizing downtime due to installation or calibration errors.
This combination of structured troubleshooting guidance and robust support network makes the Kakute F4 Flight Controller a reliable choice for both beginners and advanced UAV operators.
Environmental Adaptability
High-Temperature and Low-Temperature Operations
The Kakute F4 Flight Controller is engineered to maintain reliable performance across a broad temperature range. Its components are selected to endure both high-heat conditions during long FPV racing sessions and low temperatures encountered in outdoor industrial or research UAV operations. This ensures that critical flight functions, such as PID loops, sensor data processing, and communication with ESCs, remain stable even under temperature extremes. Pilots can confidently operate their drones in deserts, cold mountains, or variable seasonal conditions without worrying about thermal-induced malfunctions.
Dust and Moisture Resistance
Outdoor UAV operations expose flight controllers to dust, dirt, and occasional moisture. While the Kakute F4 Flight Controller is primarily designed for indoor and hobbyist FPV use, its compact design and protective PCB layout minimize the impact of airborne particles. For industrial applications or high-risk environments, pairing the flight controller with a lightweight protective casing can enhance durability against dust and water ingress, ensuring long-term reliability and uninterrupted drone operations.
Electromagnetic Interference Protection
The Kakute F4 Flight Controller incorporates electromagnetic shielding and carefully routed circuitry to reduce susceptibility to EMI (electromagnetic interference). This is crucial for maintaining consistent sensor readings and stable flight performance near high-voltage power lines, radio towers, or densely populated wireless networks. The controller’s ability to resist interference ensures that telemetry data, control signals, and OSD information remain accurate, safeguarding both autonomous and manual UAV operations.
This environmental adaptability makes the Kakute F4 Flight Controller a dependable choice for both indoor FPV pilots and outdoor UAV enthusiasts, providing performance stability and resilience in a variety of operational conditions.
Conclusion
The Kakute F4 Flight Controller stands out as a high-performance, versatile, and reliable solution for a wide range of UAV applications. Its 32-bit STM32F405RGT6 processor, combined with a high-precision ICM20689 6-axis IMU and advanced vibration isolation, ensures responsive flight control, accurate sensor readings, and smooth maneuverability. Whether you are a hobbyist building FPV racing drones, a researcher experimenting with autonomous flight, or an industrial operator using UAVs for surveying and inspections, the Kakute F4 Flight Controller delivers the precision, stability, and adaptability required for modern drone operations.
With full support for Betaflight and Cleanflight, OSD customization, BLHeli ESC pass-through, and simultaneous support for multiple serial protocols, this controller offers both ease of use and advanced configurability. The inclusion of robust safety features, telemetry capabilities, and comprehensive community resources ensures that pilots can operate confidently and troubleshoot efficiently.
In summary, the Kakute F4 Flight Controller is not just a flight controller—it is a complete UAV management solution that balances performance, reliability, and expandability. Its compact design, low weight, and wide compatibility make it ideal for both beginner and professional drone pilots. Choosing this flight controller guarantees optimized flight performance, efficient system integration, and a dependable foundation for building high-quality UAVs.
Link
 In stock now. Limited quantities available. Ships within 24 hours.
In stock now. Limited quantities available. Ships within 24 hours.
LOOKING FOR MORE? DISCOVER EVERYTHING WITH OFFER AT http://www.loftyagrotech.com
Explore more in our camera drone collection and find the right aerial companion.
Before flying, ensure you’re compliant with India’s drone regulations (DGCA DigitalSky Portal).




Reviews
There are no reviews yet.